文章图片

文章图片
文章图片
气动人工肌肉(PAM)是柔软且灵活的线性气动执行器 , 可产生类似人体肌肉的驱动 。 肌肉执行器具有适用于各种机器人平台以及医疗应用的适应性 。 尽管存在多种可能的致动方案 , 但仍然需要开发一种重量非常轻、紧凑且灵活且具有高功率重量比的软致动器 。
气动人工肌肉如今 , 机器人系统的发展变得越来越普遍 , 可能的应用包括与人类一起工作的个人或移动机器人 , 以及用于恢复或提高人类能力的外骨骼 。 由于其灵活性和柔软性 , 气动人工肌肉(PAM)在过去30年中已发展成为市场上其他可用执行器中可能的执行策略 。
人工肌肉执行器领域是高度跨学科的 , 吸引了来自机械工程、材料科学、电气工程、生物学和物理学领域的许多研究人员 。 PAM是简单的机械执行器 , 由编织网套内的弹性囊组成 , 并带有两个端部配件以密封肌肉的两端 。
当气囊被空气加压时 , 致动器要么收缩要么轴向延伸 , 运动方向取决于编织套管纤维的方向 。 收缩性PAM能够比拉伸性PAM产生更大的力 , 并且不易发生屈曲;因此 , 收缩式PAM更常用 , 也称为收缩执行器 。
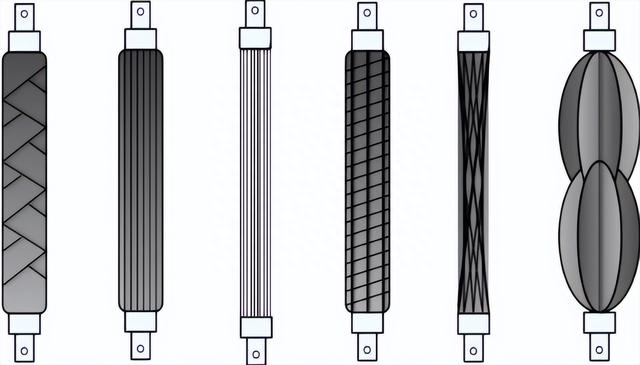
PAM操作背后的物理原理与人体肌肉相同 , 因为它将气动功率转换为拉力 。 空气的可压缩性在人造肌肉中起着不可预测的影响的重要作用 。 如图1所示 , 根据不同的工作原理、应用和设计理念 , 开发了各种类型的传统PAM 。
图1 PAM的类型
气动人工肌肉(PAM)是一种由气压操作的收缩和线性运动执行器 。 大多数此类执行器的主要两个部分是柔性芯和增强的封闭膜 , 如外壳和隔膜 。 这些肌肉致动器的两端都用端部配件(闭合件、夹具)封闭 。
核心膜由于气压的供给而向外凸出或被挤压 , 并通过核心膜将机械动力传递至负载 。 由于径向膨胀或收缩 , 铁芯轴向收缩对其负载施加拉力 。 因此 , PAM致动器实现的力(张力、负载)和运动是线性和单向的 。
要了解肌肉执行器的基本概念和工作原理 。 这种在膨胀时延伸的收缩操作将这些致动器与波纹管区分开来 。 PAM在文献中有多种名称:气动肌肉致动器、流体致动器、流体驱动张力致动器、轴向收缩致动器和张力致动器 。
PAM的基本能量来源主要是空气 , 要么被压入其中 , 要么从其中提取 。 这会在肌肉内部的空气与其周围环境之间产生压力差 , 通过该压力差可以启动PAM以获得所需的运动 。 与低压相比 , 过压可以传输更多的能量 。 大多数PAM在超压下运行 , 环境压力约为100kPa , 但有可能设计一个负压操作肌肉 。
因此 , 通过将压缩空气供应到肌肉中 , 可以获得移动负载所需的运动 , 反之亦然通过释放气压 。
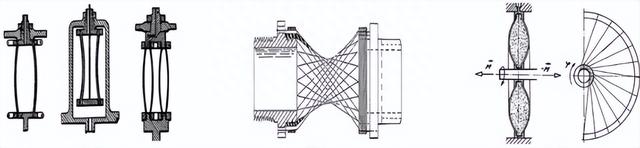
气动人工肌肉分类编织肌由气密的弹性管或气囊组成 , 周围环绕着编织网(编织、编织、套筒) , 如图2所示 。 编织纤维以一定角度(螺距角、编织角、编织角)围绕肌肉的长轴螺旋延伸 。 管子被横向压在套管上 , 管子内部的内部压力受到由于纤维曲率造成的编织纤维张力的限制 。
【气动人工肌肉执行器】纤维张力被纳入编织物的端点以平衡外部负载 。 因此 , 管和套管之间的挤压接触对于提升负载是必要的 , 并且编织肌肉不能在负压下工作 。
- 为什么年龄越大肌肉流失越快,重视力量训练,降低肌肉流失的风险
- 背部塑形让人显瘦显年轻,如何锻炼背部肌肉,塑造年轻体态
- 减脂≠减重,如何减掉更多的脂肪,并尽可能地留住肌肉?
- 年龄大了尽量维持肌肉量,从而放缓衰老速度,可以从腿部训练做起
- 发声技巧:喉部肌肉、气柱和共鸣效果
- 瘦子练肌肉不是光顾着练就行,晚上做好4件事情,才更容易长肌肉
- 男人到了中年,还有练肌肉的必要吗?有肌肉,晚年更健康
- 健身人别沾上这些坏习惯,它们会让你的肌肉快速流失
- 健身停止多久,肌肉开始退化?
- 想象力越集中,越能增强肌肉量?比起想象减肥,倒不如做好这7点