烷烃|Nature子刊:油滴“游泳”,姿势少见( 二 )
文章插图
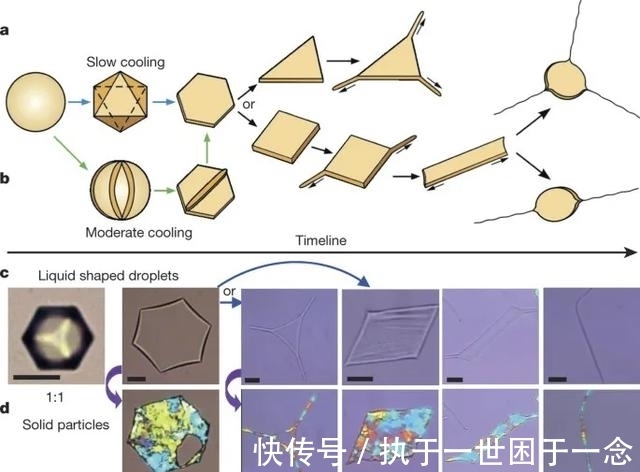
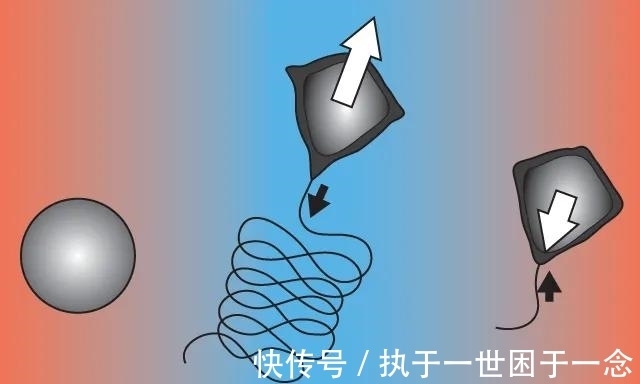
表面活性剂诱导油性微液滴变形机制示意图。图片来源:Nature[4]
处于这种状态时,油性微液滴内部的分子排列还是相对混乱的,而油水边界附近的分子由于表面活性剂的诱导,已经具有一定规则,因此将优先排列整齐。随着温度降低,弹性张力导致微液滴被拉直,由圆形向多边形转变。
文章插图
烷烃冷却结晶时的形状转变。图片来源:Nature[4]
相比于之前Nature的工作,这项工作中的微液滴“游泳机器人”的形成需要满足两个主要条件:表面活性剂具有更长的烷基链,以及较慢的降温速率促进纤细而有弹性的“尾巴”生长。微液滴表面在降温过程中发生了塑性相变,促使其尖锐的拐角处形成相缺陷,并在弹性张力作用下进一步变形,以产生弹性“尾巴”的方式释放出来,进而推动微液滴游动。
文章插图
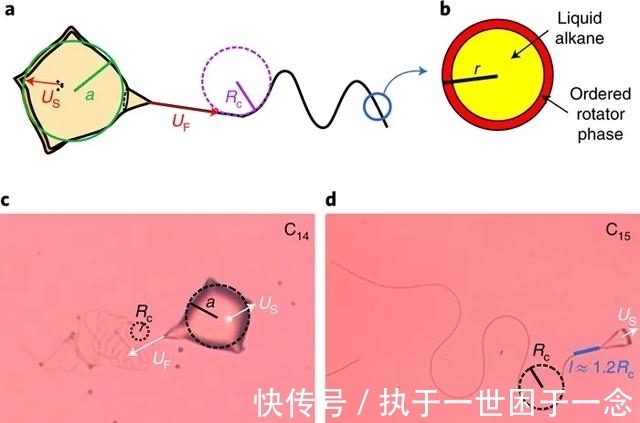
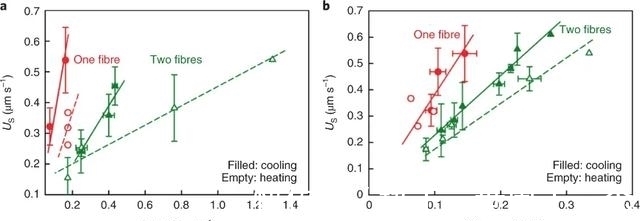
微液滴“游泳机器人”的主要运动参数。图片来源:Nat. Phys.
通过对微液滴运动参数进行量化,研究者发现,微液滴“游泳机器人”速度大约在0.1~0.7 μm s?1之间,并且随着液体的冷却速率加快而提高,二者基本呈线性关系。在相同的降温速率下,单尾微液滴的游泳速度也高于双尾微液滴。这是由于相同的降温速率下,油滴表面的塑性相形成速率相同,挤出两条“尾巴”的速率一样,两条“尾巴”不可避免地有点相互干扰,因此单尾更有利于推动微液滴向单一方向运动。
文章插图
微液滴“游泳机器人”游泳速度研究。图片来源:Nat. Phys.
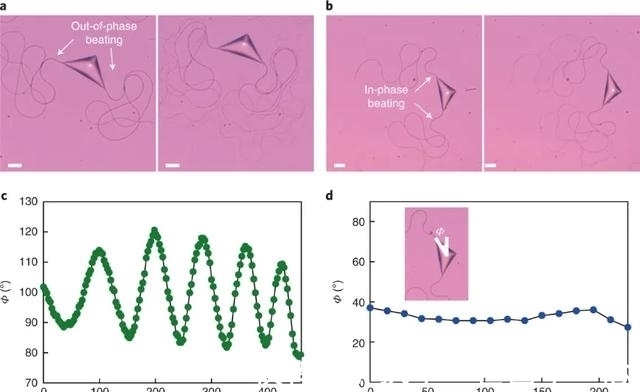
通过建立弹性流体力学模型,研究者还准确预测了双尾微液滴的“游泳”方向,及其波动的角度范围。更有趣的是,凝固前微液滴的塑性相变是可逆的。正如开始的动图中看到的那样,温度升高后,微液滴会将生长出来的“尾巴”收回去。
文章插图
微液滴游泳运动预测。图片来源:Nat. Phys.
这种微液滴“游泳机器人”的魅力在于,通过自发地自组装实现了简单的机械推进。除了实际应用之外,这些微液滴还可以为物理学家和生物学家提供一种工具,将复杂的系统简化为简单的运动现象,并从中获得灵感,比如单衣藻类生物体,如何利用两条鞭毛实现自由游动等。
文章插图
微液滴“游泳机器人”升降温变化示意图。图片来源:Nat. Phys. [5]
“这是一种新型的推进机制,它利用被挤出纤维的弹性来实现运动”,荷兰莱顿大学的物理学家Daniela Kraft评论道,“这是一项漂亮的工作”[6]。
Rechargeable self-assembled droplet microswimmers driven by surface phase transitions
Diana Cholakova, Maciej Lisicki, Stoyan K. Smoukov, Slavka Tcholakova, E. Emily Lin, Jianxin Chen, Gabriele De Canio, Eric Lauga & Nikolai Denkov
Nat. Phys.,2021, DOI: 10.1038/s41567-021-01291-3
参考文献:
[1] F. Soto,et al. Medical Micro/Nanorobots in Precision Medicine.Adv. Sci.,2020,7, 2002203. DOI: 10.1002/advs.202002203
[2] D. Walker,et al. Optimal Length of Low Reynolds Number Nanopropellers.Nano Lett.,2015,15, 4412-4416. DOI: 10.1021/acs.nanolett.5b01925
[3] E. Han,et al. Low-Reynolds-number, biflagellated Quincke swimmers with multiple forms of motion.PNAS,2021,118, e2022000118. DOI: 10.1073/pnas.2022000118
[4] N. Denkov,et al. Self-shaping of oil droplets via the formation of intermediate rotator phases upon cooling.Nature,2015,528, 392-395. DOI: 10.1038/nature16189
- 一向热衷于保护自己的肾科普的我最近在Science子刊上看到一项研究该研究称加工食物中的...|真香警告丨为什么越香的的东西越伤肾
- 心脏|饮酒诱发房颤!Nature子刊研究
- 食物|《细胞》子刊:贝勒医学院徐勇团队发现SCR-2调节动物对禁食和营养过剩的适应性
- Ucp|《自然》子刊:让白色脂肪“弃暗投明”的关键找到了!科学家首次发现,线粒体蛋白OPA1能促进白色脂肪细胞自主褐化丨科学大发现
- 鲁勇|《自然》子刊:全面消除肿瘤中的免疫抑制细胞,终于实现了!
- 功能|《自然》子刊:妈妈给的不只是抗体!科学家揭示,母乳能够被婴儿肠道微生物转化为芳香乳酸,调节免疫细胞功能的机制丨科学大发现
- 调查了800对新婚夫妇,JAMA子刊发现其「共同心病」
- 有关|《柳叶刀》子刊:工作时长不宜太长!科学家发现,每周工作时间≥55小时与65岁前感染和心血管死亡风险显著增加45%和52%有关
- JAMA子刊:间歇式禁食,会是减肥「黑科技」吗?
- Tiganis|《科学》子刊:多跑跑,糖尿病不找!科学家发现,运动会诱导骨骼肌表达一种酶,能增强肌肉功能,预防甚至逆转胰岛素抵抗丨科学大发现